Previous explorations
Over the first weeks of our research, we tracked hidden data of how social physical interactions influence us and transformed it into 4 visualizations. And each member of our team ended up highlighting one particular aspect in his/her work – either feelings before and after, or the amount of interactions, or who initiated it, or even which part of the body was touched the most, despite the fact that all of us tracked the same data. So, afterward presenting our work, it led us to the thought of what exactly it is that we want to bring to our haptification and what are the needs of our users?
Persona
We created Jack to keep us on the right track while building a product. As we noticed after our visualizations, there are far too many ways to go around the very same data. So, we narrowed down our expectation of the final product to the following question:
How did each particular interaction affect me?
And two complementary ones: What influenced that? Can I, as a user, do something consciously about it to feel better?
Materials exploration
However, not to get ourselves biased towards any ideas, we started our journey towards haptification from direct exploration of materials that we can possibly use, avoiding any expectations about the material itself. All 4 members of the team collected various materials and their qualities for a week. We touched all things around, photographed it and wrote down for ourselves the qualities of materials or overall discoveries about the material world we live in. And on the team meeting we came up with the list of our preliminary discoveries:
- There is a number of basic materials that we meet in different forms
- Organic vs non-organic materials is a very interesting field of exploration
- Naturalness of material is a straightforward characteristic conceptually, but very complex when described via particular properties
- Material properties are usually scales
- Emotional associations might not be the same as properties
- Grains and liquids create opportunities for a dive-in usage.
And another interesting discovery we made on our way was the “closed eyes test” method for researching materials and properties that go beyond visuals. We found it very tricky to change the usual way of perceiving info with eyes to the situation when the qualities of an object are explored by the touch only. And once you close your eyes, you automatically switch to other senses. So, we made it our main agenda for building the product to make it fully explorable without visuals. And we also assumed that it could be very beneficial for our Jack to practice ”new” senses and to possibly let out his inner child in this process.
Product form
The next step of our exploration was to define the form factor of our future product. At first, we analyzed the existing forms of physical objects. And we realized that actually, anything from a plate, a pencil or a notebook can be a haptification of data once some encoding of its properties is given. For example, the thickness of the notebook and the material of the cover could perfectly encode something thus making the object to represent something. However, for our case we had far more than two parameters to encode for each Interaction in our data. So, our main challenge was to find the form that will give us the freedom to do that.
We started with exploring possibilities of the heatmap visualizations turned into haptics. This approach was denied as it does not give enough freedom for exploring each particular interaction in depth. Then tried the “filled pillows” approach for the loose materials. The main drawback of which was the density of the outer material: thick material made it hard to explore the objects inside, thin material did not allow to put sharp objects inside thus excluding an opportunity to use sharpness as an encoding parameter as well as some other parameters of inner materials.

In the end, we decided to take the best out of two approaches and created open bags out of fabric to represent each interaction with some haptically explorable filling. The only thing left was to encode our data.
Encoding possibilities
We splitted encoding possibilities into three areas: haptic, mixed and visual. Our main goal was to use haptic or mixed as much as possible to allow our product to pass the “closed eyes test”.
The haptic group of encoding factors included Softness, Flexibility, Smoothness, Warmth, Thickness, Density and Weight. The mixed group included Size, Existence of specific part and Shape and form in 3D.
We also took into account that some materials can include several encodings and can be used in different aspects. As well as the same kind of material (eg. cotton), can change its properties depending on the way it was processed (jeans, t-shirt fabric…)
This led us to the idea, that we can also make out haptification flexible on this regard and not limit encoding to particular materials, but rather to characteristics of it and only offer options of materials to haptify data.

Product
We tried to create a product which anyone like our Jack can use and our concept of open-ended material choice played well for this.
To do that we assigned to all data parameters specific quality scale or multiple options encoding possibilities. However, the material itself was left open.
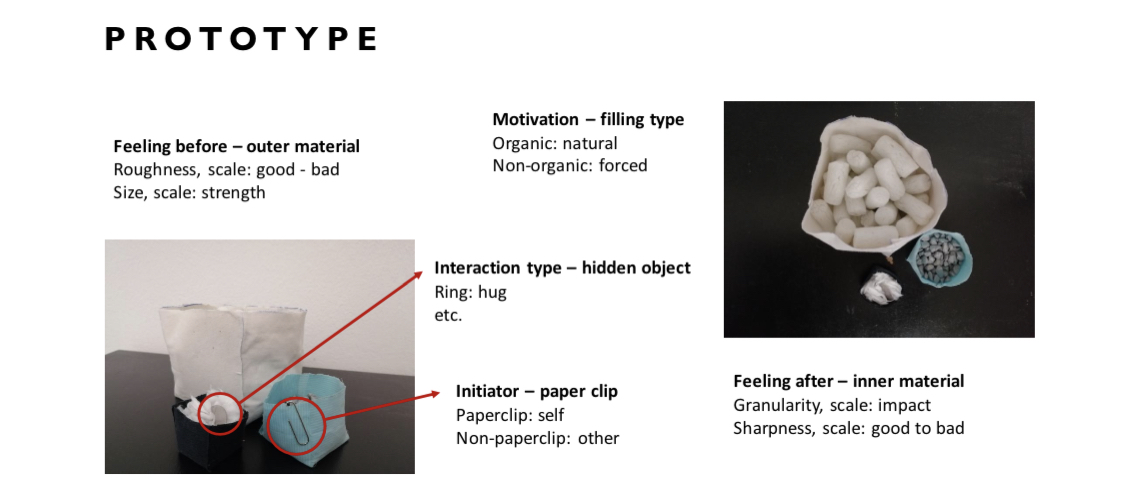
Each interaction is presented as a bag.
The feeling before is represented by the outer material, where the Roughness of the material stands for the good-bad scale and Size scale – for the strength of the feeling.
The feeling after is encoded via inner material, where the Granularity scale represents the impact of the interaction on the person and the Sharpness of the filling encodes the scale of how good or bad this feeling was.
Motivation to interact with others was a binary data thus we encoded it with a binary parameter of Organic-ness of the inner material.
Interaction type is a multi optional data and it was assigned to the particular types of objects hidden inside the filling. As the types can vary, our encoding stays very flexible and can be narrowed down or extended by every user.
The initiator is also a binary data type, which we encoded via the existence of an object. In this case – a paperclip.
In this particular prototype our team made, it can be seen how flexible this system is. And it actually allows for haptification of interactions using various objects that the user has at home. Moreover, most of the materials here can be reused in multiple ways for further work on exploring interactions or for the direct usage be that hanging pictures on the wall or using it in cooking.
Also, it fully allows the user to work on the question we stated after defining our persona “How did each particular interaction affect me? “ And beyond that, our product allows one to express oneself while creating haptifications.